
令和5年秋の叙勲において、瑞宝中綬章を受章されました小坂田宏造名誉教授より大阪大学基礎工学部機械工学同窓生に向けてのメッセージを頂戴しました。
授章御礼
小坂田宏造
2023年の秋の叙勲において瑞宝中綬章を頂けることになり、11月13日に東京のホテル椿山荘の伝達式で勲章と勲記を頂き、その後にバスで皇居に向かい、皇居豊明殿において天皇陛下に拝謁しました。瑞宝中綬章は、主に、国立大学で教授や助教授として長年勤務した人に与えられる勲章ですが、私は神戸大学で14年間助教授、広島大学で4年間教授、大阪大学で18年教授と、勤務年数だけは長いために授章したようです。最も長く勤務した大阪大学基礎工学部・研究科では、学生であった皆様に支えて頂いたお陰で無事過ごすことができ、厚く御礼申し上げます。
私が大阪大学に移るきっかけは、広島大学教授に赴任して間もなく当時大阪大学基礎工学部長をしておられた福岡秀和教授が蒜山への研究室旅行のついでに訪ねて来られ、退官された山本明教授が担当されていた生産加工学講座の後任教授にお誘いを受けた時です。当時の福岡先生は超音波による材料強度測定の研究を中心にしておられましたが、以前は塑性力学の理論研究もされておられたため日本機械学会関西支部などで面識がありました。塑性加工などの研究では企業や大学に仲間の多くいる関西が便利かと思うようになり、また神戸の両親が相次いで亡くなったという個人的な事情もあり、1988年に大阪大学に移りました。
大阪大学基礎工学部と基礎工学研究科では、生産関係の科目の他に塑性力学や計算力学を担当しました。自分自身が学生時代に習った生産関係の授業が加工方法の羅列で面白くなく興味を持たなかったことから、加工方法の物理や力学を中心とした内容にして、ものづくりを科学的に考えるような工夫をしました。
大阪大学に赴任した頃はバブル経済の最中で、世の中では土地や株式の高騰で苦労なく金儲けができる仕事が人気を集め、金融立国が将来の日本の姿と考えられていました。製造業は危険、汚い、きつい3K職場と呼ばれて嫌われていましたが、中でも鉄鋼などの塑性加工関連企業は人気のない仕事でした。基礎工学部の中でも生産関係の科目は学生の関心が低く、科目の魅力を持たすために苦労しました。それでも、有限要素法解析を中心にした塑性加工の研究は泥臭いイメージを薄めたのか、研究室では博士課程まで進学した学生も多く、留学生や社会人も多く入り、研究室は活気があったように思います。
大阪大学では、神戸大学時代に開発した剛塑性有限要素法と広島大学で学んだ情報工学の手法を結び付けて塑性加工法の最適化を中心に研究をしていました。しかし、有限要素法と情報工学を組み合わせた研究結果は産業界では殆ど使われなかったため、研究の方向変化を模索していました。鍛造や圧延といった塑性加工法は20世紀期前半までに欧米で開発された技術であり、有限要素法も1960年前後に航空機の弾性解析のため米国で開発された方法であったため、自分の研究のルーツは日本にはないように感じていました。このため、日本の研究者としては、今までにない日本発の基本技術の開発が不可欠であると思うようになりました。
1990年代後半から、有限要素法解析とコンピュータ制御を道具として新しい金属加工方法の開発に集中するようになりました。(その後開発されたサーボプレスのように)スライド速度を自由に変化したり逆転したりできるプレスの出現を想定した新しい鍛造方法や、金属粉末の上にレーザー光を走査して積層して成形する金属三次元造形などの新しい加工方法を研究室の学生の皆様と一緒になって開発しました。
新しい加工方法が実用化されるには産業との連携が不可欠であり長い時間もかかりますが、多くの研究者・技術者が新規技術の開発をしないと、(1970年代に私が留学していた)英国のように製造業の衰退を招くという思いで、2006年に大阪大学を退官するまで、これを続けました。
大阪大学退官後は、以前から研究で協力関係にあったダイジェット工業㈱と㈱ニチダイから顧問就任の声がかかり、現在まで若い人たちの技術開発の教育に携わっています。また、現在の日本の製造業では人材育成と新技術開発が最重要課題と考え、同分野の友人たちとフォージネットという技術コンサル会社を作り、製造企業の技術者教育や技術開発のお手伝いをしています。
コロナ禍は終わりましたが、ウクライナやイスラエルでの戦争、1990年代の日本に似た中国の不動産バブルの崩壊、欧州の不況、米国の国論二分など、世界は第二次世界大戦前のような不安定な状態にあります。日本を支えている自動車産業でも内燃機関自動車から電動自動車への移行が進行しており、日本産業の基盤が揺るがされる恐れもありますが、新技術開発により低迷して来た経済から脱出するチャンスの可能性もあると思います。
大阪大学に赴任した1990年頃のバブル時代やその後のバブル崩壊後の時代には金融やIT、バイオなどを日本産業の中心にする夢物語が語られましたが、最近では日本を支えているのは製造業であることがはっきりしてきました。大阪大学基礎工学部機械関係学科を卒業された皆様には、得意とされる科学的思考により技術開発の先頭に立って、ロボットやハイブリッド車、工作機械のような機械と情報技術を組み合わせた日本の得意技術を進化させて行かれることを夢見ています。

Last Update : 2023/11/21
大阪大学基礎工学部 機械工学同窓会では例年、機械科学コース出身卒業生と現役学生・大学院生との交流会を主催しています(本年度もオンラインで開催 )。
【開催日】2023 年 12 月 9 日(土)
【場 所】オンライン開催 (Zoom)
【対 象】機械科学コース所属の学生あるいは
機械科学コース研究室所属の大学院生
【参加費】無料
【プログラム(予定)】
13:00 ~ 13:10 開催挨拶
13:10 ~ 14:30 企業紹介
14:30 ~ 14:45 休憩
14:45 ~ 16:20 グループディスカッション
【参加企業(予定)】
(株)IHI、(株)神戸製鋼所、川崎重工業(株)、住友化学(株) 、
積水化学工業(株)、パナソニックグループ、
マツダ(株)、ミズノ(株)、三菱電機(株)(50音順)
【申込方法】
申込フォーム(下記リンク)から登録
https://forms.gle/5T92XgyUaX4TupnUA
【主催】大阪大学基礎工学機械工学同窓会
【協力】大阪大学基礎工学部システム科学科機械科学コース
※詳細はこちらのチラシをご覧ください。
Last Update : 2023/11/21
コロナ禍のため中止されていた基礎工学部同窓会関東支部の集いが4年振りに開催されることになりましたのでお知らせいたします。皆様お誘いあわせの上、多数ご出席くださいますようお願い申し上げます。
【開催概要】
日時:2023年12月 9日(土)12:00〜15:00(11:30より受付開始)
場所:主婦会館プラザエフ 9階 スズラン
https://plaza-f.or.jp/
JR四ツ谷駅 麹町口 徒歩1分
12:00 開会挨拶 基礎工学部同窓会 関東支部長 松尾豊様
(名古屋大学教授、合成2001D修)
12:10 「大阪大学基礎工学部の近況」
基礎工学研究科長・学部長 和田成生様(機械1991D修)
12:30 「大阪大学エマージングサイエンスデザインR3センターのご紹介」
エマージングサイエンスデザインR3センター特任教授
宮坂博様(合成1985D修)
12:40 記念講演「人工知能AIの現状と未来」~ChatGPTを例として~
国立情報学研究所 教授/総合研究大学院大学 教授
東京工業大学 特定教授/人工知能学会 元会長 山田誠二様
(制御1989D修)
13:20 懇親会(立食)、懇親会、記念撮影
15:00 閉会
会費:7,000円
出席・欠席の返信の連絡先(下記学科代表にメールでご返信ください。)
Last Update : 2023/11/21
叙勲のお知らせ
小坂田宏造名誉教授が瑞宝中綬章を受章
令和5年秋の叙勲において、1988年から2006年まで基礎工学部機械工学科(機械科学コース)教授をされていました小坂田宏造 名誉教授が瑞宝中綬章を受章されました。
瑞宝章は、公務等に長年にわたり従事し、国家または公共に対し功労のある方に授与されます。
この度のご受章、心よりお祝い申し上げます。
機械工学同窓会
会長 西川 敦
Last Update : 2023/11/07
大阪大学では、平成18年より、卒業生・修了生や、在学生、現旧教職員などの「阪大ファミリー」がキャンパスに集い、交流を深める「大阪大学ホームカミングデイ」を開催してまいりました。
コロナ禍で、令和2年からは、オンラインで開催しておりましたが、このたび、4年ぶりに対面にて開催することとしましたので、ご多用の折とは存じますが、是非ご参加いただきたく、下記のとおりご案内申し上げます。
なお、ホームカミングデイ特設サイトでは、キャンパスを懐かしんでいただくための様々なコンテンツをご用意しておりますので、ぜひご覧ください!
ホームカミングデイ終了後には、特設サイトにて当日の様子も配信する予定です。当日のご参加が叶わないという方は、是非、当サイトからお楽しみください。
多くの皆様のご参加をお待ちしております。
【開催日】2023年11月5日(日)
10:00~11:30 講演会(大阪大学会館(旧イ号館)講堂)
12:00~13:30 交流会(大阪大学学生交流棟カフェテリア
「かさね」)
※参加費無料!アルコール類の提供はございません。
【講演会】〇あいさつ 大阪大学同窓会連合会 岸本 忠三 会長
〇大阪大学近況報告 大阪大学 西尾 章治郎 総長
〇卒業生による講演
「阪大の医学研究とその臨床への応用」
熊ノ郷 淳 大阪大学医学系研究科長
「OUグローバルキャンパスの目指すところ~箕面から世界へ~」
竹村 景子 大阪大学外国語学部長
「大阪大学がリードする産学共創による研究推進と人材育成について」
桑畑 進 大阪大学工学研究科長
〔司会〕関 純子さん(本学卒業生・関西テレビ放送アナウンサー)
なお、参加ご希望の方は、以下参加申込みFormより事前にお申込みください。
参加申込みForm:https://forms.office.com/r/7apNPZiyGF
※2023年10月15日(日)までにお申し込みください。
※お申し込み多数の場合は 卒後5・10・20周年の卒業生・修了生を優先するとともに先着順で受付けさせていただきますので、予めご了承ください。
※詳細は特設サイト( https://ou2023hcd.alumni.osaka-u.ac.jp/ )をご覧ください。
Last Update : 2023/09/19
令和4年度総会をWEBにて開催致します。
下記の議案についてご審議をお願いします。ご意見、ご質問がある場合、ご承認頂けない場合は、令和5年7月31日(月)までに、機械工学同窓会事務局までメールにてご連絡ください。期日までにご連絡がない場合は、ご承認頂けたものとさせて頂きます。
記
議案1 同窓会会則の変更について
1-1 資料2の同窓会会則の変更案を承認する。
議案2 令和4年度会計監査報告について
2-1 資料4の会計報告を承認する。
議案3 令和5年6月8日開催 幹事会議決事案について
3-1 幹事会で議決された事案(資料5 幹事会議事録参照)を承認する。
(資料1) 令和5年度同窓会役員一覧(掲載期間は終了しました。)
(資料2) 会則の変更について(掲載期間は終了しました。)
(資料3) 令和4年度活動報告(掲載期間は終了しました。)
(資料4) 令和4年度会計報告書(掲載期間は終了しました。)
(資料5) 幹事会議事録(掲載期間は終了しました。)
(注)資料4にはパスワードがかかっております。会員ログインをして頂きますと、パスワードが書かれていますので、それをお使いください。
【連絡先:大阪大学基礎工学部機械工学同窓会 事務局】
E-Mail dosokai-jimu[at]me.es.osaka-u.ac.jp
※[at]は@に置き換えてください。
Last Update : 2023/06/20
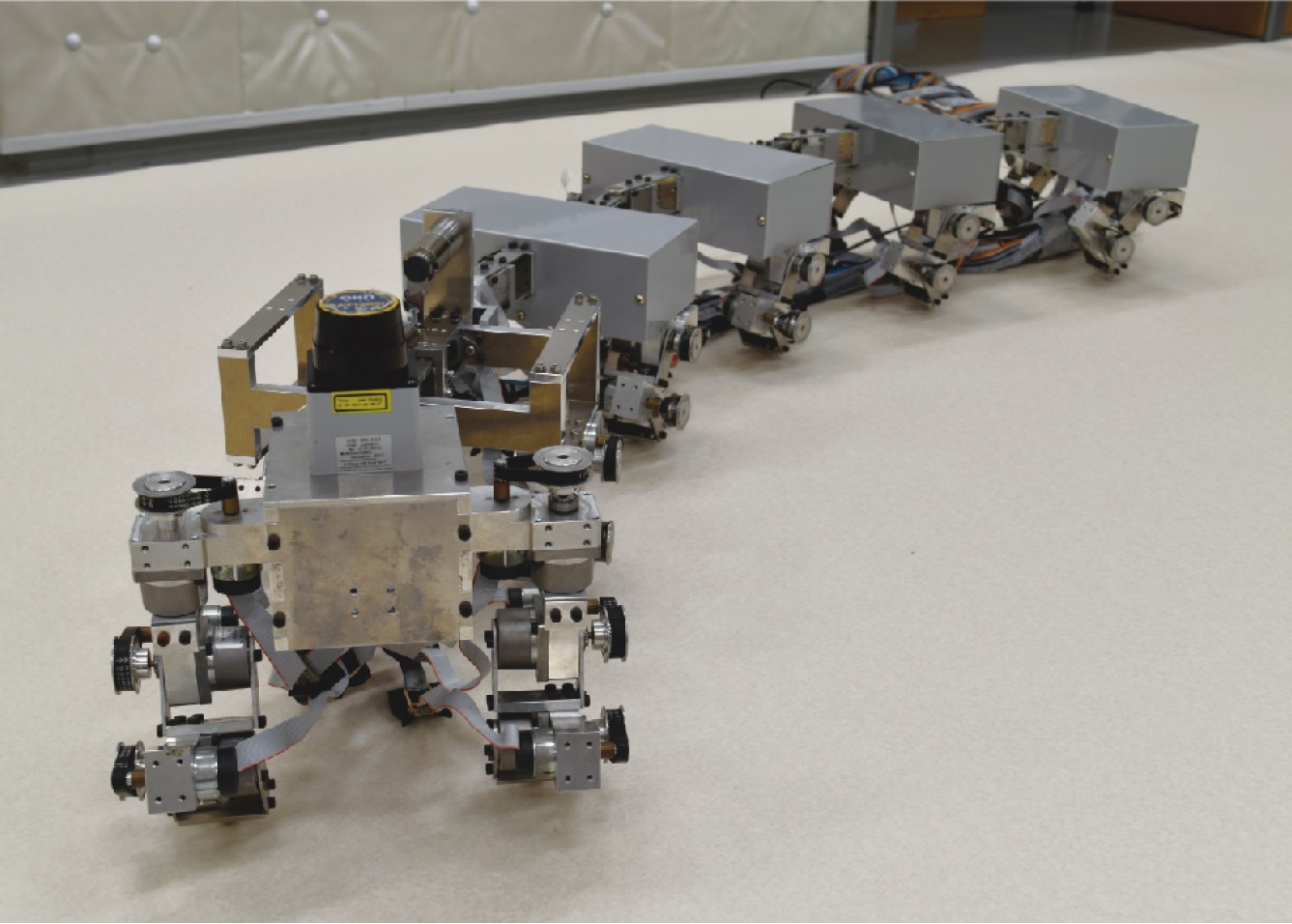
【生体工学領域・青井 伸也 教授】
歩行の不安定化は役に立つ!?
-多足ロボットの機敏な歩行を実現する新技術-
 ・不安定性を利用することで多足ロボットの機敏で効率の良い歩行の実現に成功
・不安定性を利用することで多足ロボットの機敏で効率の良い歩行の実現に成功
・環境と複雑に相互作用する多くの足の運動計画や制御の問題に対して、直線歩行の安定性を制御する機構を導入し、通常排除する不安定性をむしろ積極的に利用することで機敏な歩行を実現可能にした
・惑星探査や災害現場のような人が立ち入ることの難しい場所など様々な状況での利用に向けた応用へ期待
 (図1)
(図1)
大阪大学大学院基礎工学研究科の青井伸也教授の研究グループは、不安定性を利用した多足ロボットの機敏で効率の良い歩行の実現に成功しました(図1)。
多足ロボットは、多くの足を持つために耐故障性や転倒回避性に優れており、様々な場所で活用できると期待されています。しかしながら、環境と複雑に相互作用する多くの足の運動計画や制御は難しく、その実現は困難でした。特に、地面につけている多くの足が障害となり、急旋回のような機敏な運動を行うことは至難の業でした。
青井伸也教授の研究グループでは、回転バネにより柔軟な体軸を持つ多足ロボットにおいて、そのバネ剛性をパラメータとするピッチフォーク分岐によって直線歩行が不安定化し、剛性に依存した半径を持つ円歩行に遷移することを明らかにしていました(Aoi et al., 2022)。今回、その剛性を変化させる機構をロボットに搭載することで直線歩行の不安定化を自在に引き起こし、さらにそれによって遷移する円歩行の半径を制御することで、機敏で効率の良い歩行の実現に成功しました。これにより、惑星探査や災害現場のような人が立ち入ることの難しい場所など、様々な状況での利用に応用されることが期待されます。
本研究成果は、米国科学誌「Soft Robotics」に、2023年5月29日(月)13時(日本時間)に公開されました。
詳細は大阪大学ホームページ(ResOU)をご参照ください。
Last Update : 2023/06/09

最新記事
- 授章御礼 (2023/11/21)
- 大阪大学 基礎工学部 機械工学同窓会 主催
卒業生と学生との交流会 エンジニアのキャリアパス勉強会 2023 (2023/11/21) - 大阪大学基礎工学部同窓会関東支部の集い(第10回)開催のご案内 (2023/11/21)
- 叙勲のお知らせ (2023/11/07)
- ★「大阪大学ホームカミングデイ2023」のご案内★ (2023/09/19)
News
同窓会について
会員の足跡
サイト内検索
