
【生体工学領域・青井 伸也 教授】
歩行の不安定化は役に立つ!?
-多足ロボットの機敏な歩行を実現する新技術-
 ・不安定性を利用することで多足ロボットの機敏で効率の良い歩行の実現に成功
・不安定性を利用することで多足ロボットの機敏で効率の良い歩行の実現に成功
・環境と複雑に相互作用する多くの足の運動計画や制御の問題に対して、直線歩行の安定性を制御する機構を導入し、通常排除する不安定性をむしろ積極的に利用することで機敏な歩行を実現可能にした
・惑星探査や災害現場のような人が立ち入ることの難しい場所など様々な状況での利用に向けた応用へ期待
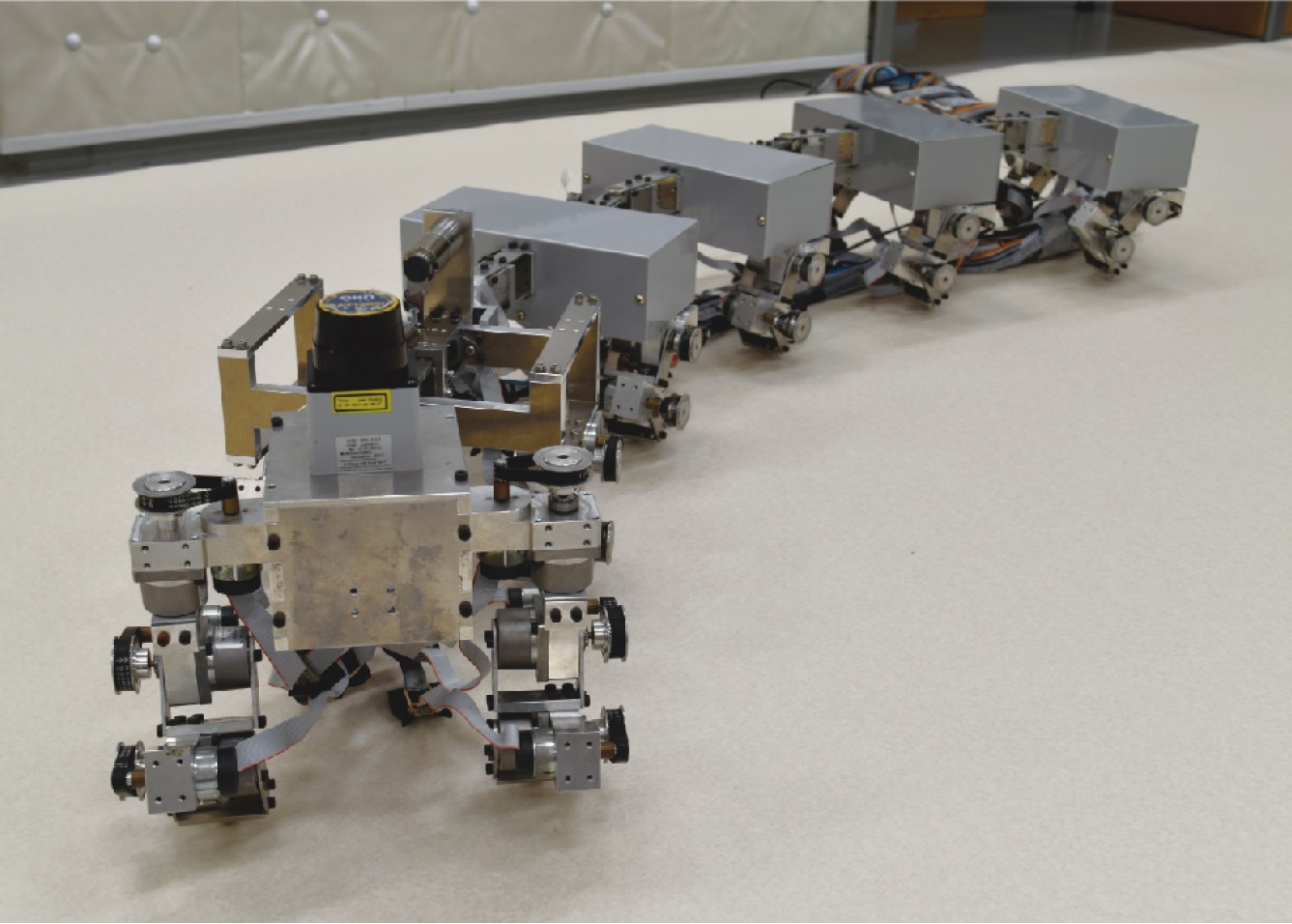 (図1)
(図1)
大阪大学大学院基礎工学研究科の青井伸也教授の研究グループは、不安定性を利用した多足ロボットの機敏で効率の良い歩行の実現に成功しました(図1)。
多足ロボットは、多くの足を持つために耐故障性や転倒回避性に優れており、様々な場所で活用できると期待されています。しかしながら、環境と複雑に相互作用する多くの足の運動計画や制御は難しく、その実現は困難でした。特に、地面につけている多くの足が障害となり、急旋回のような機敏な運動を行うことは至難の業でした。
青井伸也教授の研究グループでは、回転バネにより柔軟な体軸を持つ多足ロボットにおいて、そのバネ剛性をパラメータとするピッチフォーク分岐によって直線歩行が不安定化し、剛性に依存した半径を持つ円歩行に遷移することを明らかにしていました(Aoi et al., 2022)。今回、その剛性を変化させる機構をロボットに搭載することで直線歩行の不安定化を自在に引き起こし、さらにそれによって遷移する円歩行の半径を制御することで、機敏で効率の良い歩行の実現に成功しました。これにより、惑星探査や災害現場のような人が立ち入ることの難しい場所など、様々な状況での利用に応用されることが期待されます。
本研究成果は、米国科学誌「Soft Robotics」に、2023年5月29日(月)13時(日本時間)に公開されました。
詳細は大阪大学ホームページ(ResOU)をご参照ください。
Last Update : 2023/06/09

最新記事
- 大阪大学 基礎工学部 機械工学同窓会 主催
卒業生と学生との交流会 エンジニアのキャリアパス勉強会 2025 (2025/09/16) - 研究室だより Vol.29 垂水研究室 (2025/07/31)
- 研究室だより Vol.28 垂水研究室 (2025/07/02)
- 令和6年度WEB総会のご案内 (2025/06/03)
- 大谷 智仁 准教授が令和7年度 科学技術分野の文部科学大臣表彰を受賞 (2025/05/21)
News
同窓会について
会員の足跡
サイト内検索
