
機能デザイン領域 制御生産情報講座 ロボティクス・メカトロニクスグループ
ロボット工学の観点から人間を科学し、人間を支援する
教授・宮崎 文夫、講師・平井 宏明、助教・植村 充典
宮崎研究室では、人間とロボットの関係を考察し、両者の融合する過程を通して、人間の能力を拡大するシステムの構築を目指しています。現在、人間とロボッ トのインタラクションタイプに応じて多角的に研究を進めることで、人間を理解し、支援するための方法論の確立を行っています。
医学・生理学、人間工学、スポー ツ科学等の人間を対象とした隣接分野から得られる断片的な知見や仮説を元に、近年、2つのロボットシステムを開発しました。
ツ科学等の人間を対象とした隣接分野から得られる断片的な知見や仮説を元に、近年、2つのロボットシステムを開発しました。
図 (a) に示したのは、人間の運動学習を支援する力覚提示ロボットです。人間の運動スキルを定量評価し、運動改善のための具体的な教示を行います。
一方、図 (b) に示したのは、人間の身体構造を模擬した筋骨格ロボットです。運動支援の対象である人間の運動制御の解明へ向けて、ロボット工学の立場からアプローチするのに役立ちます。
この他にも、当研究室では、装具ロボットをはじめ、人間を支援するさまざまな研究テーマに取り組んでいます。詳細は下記の宮崎研ホームページを参照してください。
宮崎研究室
http://robotics.me.es.osaka-u.ac.jp/MiyazakiLab/
Last Update : 2016/03/22
非線形力学領域 熱流体力学講座 流体力学グループ
流れによる輸送
教授・後藤晋、准教授・吉永隆夫、助教・渡邉陽介
たとえばコーヒーに砂糖を溶かすとき、じっと待っているよりも、スプーンでかき混ぜた方がずっと速く溶けます。これは、分子運動による砂糖の拡散に比べて、流れによる移流の方が(とくに長距離の輸送に関して)効率がよいからです。このように、流れ、とくに乱れた流れ(乱流)による輸送や混合が強力であることは直感的には明らかですが、どのようなメカニズムで、この強い輸送や混合が維持されているのかは必ずしも明らかではありません。 そこで、我々のグループではスーパーコンピュータを用いた大規模な数値シミュレーション(右の図を参照)や室内実験を用いて、この複雑現象の解明に取り組んでいます。とくに、21世紀に入って「地球シミュレーター」や「京コンピュータ」に代表される国内の優れたスーパーコンピュータの出現により、乱流の研究は新しい時代を迎えました。つまり、実験室で実現されるのと同程度かそれ以上に発達した(高いレイノルズ数の)乱流がコンピュータ上でシミュレート可能になったからです。
そこで、我々のグループではスーパーコンピュータを用いた大規模な数値シミュレーション(右の図を参照)や室内実験を用いて、この複雑現象の解明に取り組んでいます。とくに、21世紀に入って「地球シミュレーター」や「京コンピュータ」に代表される国内の優れたスーパーコンピュータの出現により、乱流の研究は新しい時代を迎えました。つまり、実験室で実現されるのと同程度かそれ以上に発達した(高いレイノルズ数の)乱流がコンピュータ上でシミュレート可能になったからです。
数値シミュレーションによれば、流れの詳細な3次元構造とその運動を正確に捉えることができます。私たちはこのメリットを最大限に活かして、輸送現象の本質を解き明かしました。乱流は、大小さまざまな渦の集合です。たとえば、右の図中には3つの異なる色で、異なる大きさの「渦」を可視化しています。具体的には、赤色が一番大きなスケールの渦、黄色が中間スケールの渦、青色が小さなスケールの渦を表します。このような可視化により、乱れた流れの中にも秩序立った渦が存在いることが分かります。しかも、これらを注意深く観察・解析すると、各スケールの階層で、これらの渦は互いに反対まわりに旋回するもの同士が近接して存在するという性質があることが分かりました。いわば、乱流中には、台所で使う「ハンドミキサー」、しかも大小さまざまなハンドミキサーが共存していることになります。これが、乱流が強い混合や輸送を生み出すメカニズムです。私たちは、この知見を活かした応用研究にも取り組んでいます。
流体力学グループ
http://fm.me.es.osaka-u.ac.jp/
Last Update : 2016/02/10
機能デザイン領域 推進工学講座 流体工学グループ
気液界面を有する流れの研究
教授・杉山 和靖,准教授・堀口 祐憲,助教・米澤 宏一
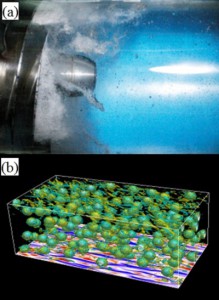
液体の流れの中では,流れ方に応じて圧力に分布ができます.圧力が飽和蒸気圧よりも低くなると,気泡が発生します.この現象をキャビテーションと呼びます.キャビテーションは,高速で運転される流体機械,装置で発生し,性能劣化,振動・騒音,壊食の原因となります.キャビテーションは,19世紀末に発見されて以来,多くの研究者によって研究されてきましたが,未だ,予測が極めて難しい現象です.理由には,(i) 分子スケール (nm) から,気泡のスケール (μm~mm),機器のスケール (mm~m) に至るまで,多重のスケールの動力学が関係すること,(ii) 気液の混在する多相流れであり,キャビティ界面が複雑に変形することが挙げられます.特に後者に関して,泡だらけな状態 (図(a)) になると,流れ方が変わり,機械/装置に働く流体力が変わります.その結果,設計どおりの性能が発揮できなくなるばかりでなく,望まない振動を引き起こし,危険な状態に至る場合があります.安全面での想定外を無くすには,事前に現象を忠実に,包括的に捉えること,さらに,現象の本質を引き出し,単純化したモデルを築くことが重要です.そうすることで初めて,問題を理解し,問題に取り組むことにつながるからです.私たちは,例えば,翼面キャビテーションの動特性に着目し,流量変動に対するキャビティ界面の応答などを,実験や数値シミュレーションによって調べています.
液中の気泡は,害になるばかりでなく,有益な特性を示す場合があります.特に,径の小さなマイクロバブルには,超音波医療画像の鮮明化を実現するセンサ機能や,音響エネルギの集束や乱流の抑制・促進を実現するアクチュエータ機能があります.私たちは,複雑な界面運動を予測する計算手法 (図(b)) を開発するとともに,マイクロバブル流れの機能を上手く使いこなすための研究にも取り組んでいます.
図(a): インデューサに生じるキャビテーションの実験.図(b): チャネル内気泡流
Last Update : 2015/08/17

最新記事
- 大阪大学 基礎工学部 機械工学同窓会 主催
卒業生と学生との交流会 エンジニアのキャリアパス勉強会 2025 (2025/09/16) - 研究室だより Vol.29 垂水研究室 (2025/07/31)
- 研究室だより Vol.28 垂水研究室 (2025/07/02)
- 令和6年度WEB総会のご案内 (2025/06/03)
- 大谷 智仁 准教授が令和7年度 科学技術分野の文部科学大臣表彰を受賞 (2025/05/21)
News
同窓会について
会員の足跡
サイト内検索
