
【非線形力学領域・垂水 竜一 教授】
結晶の中で力が生まれるメカニズム
―柔らかい幾何学を用いた材料科学の新しい理論―
 ・微分幾何学(※1)を用いてらせん転位(※2)の周辺
・微分幾何学(※1)を用いてらせん転位(※2)の周辺
に形成される力学場を解析
・転位による結晶格子のゆがみは空間のリッチ曲率
(※3)を表しており、これが結晶の中に力を生み出す
直接的な起源となる
・結晶材料の強度・延性向上のための新しい理論として
広範な応用展開が可能
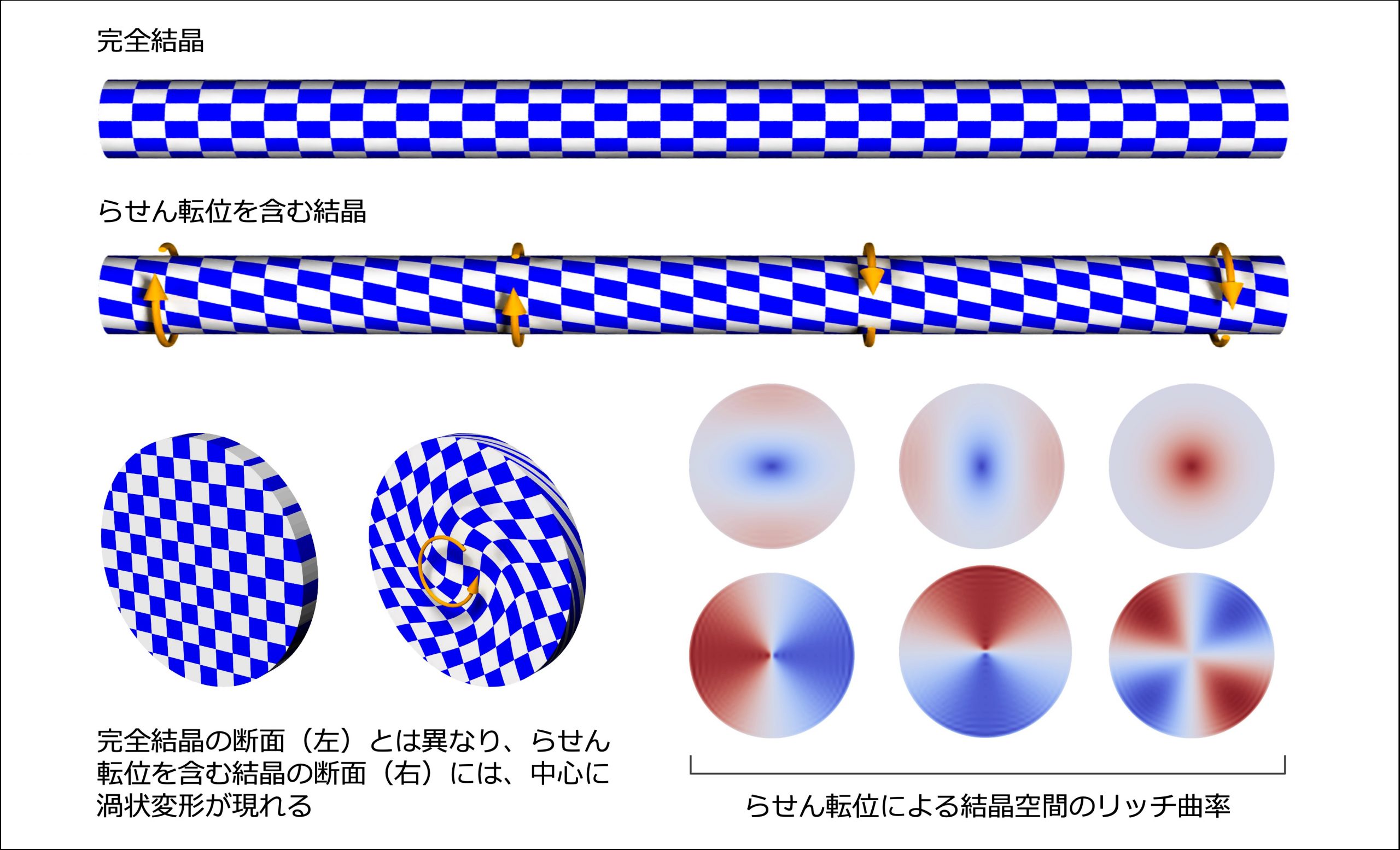
大阪大学大学院基礎工学研究科の小林舜典助教と垂水竜一教授は、らせん転位によって生み出される結晶格子の乱れが結晶格子の中で力へ変換されるメカニズムを数学的に解明しました。らせん転位は結晶材料の強度や延性を決定する重要なトポロジカル欠陥の一つですが、その力学的な性質に関する研究は十分進んでおらず、多くの研究課題が残されていました。
今回、垂水教授らの研究グループでは、らせん転位の理論解析に微分幾何学を用いることによって、(i)らせん転位の中心には「リッチ曲率」と呼ばれる結晶空間のゆがみが存在すること、(ii)リッチ曲率は通常の結晶空間(ユークリッド空間)と非整合な「幾何学的なフラストレーション(※4)」状態を生み出すこと、(iii)フラストレート状態の解消に必要な弾性変形が力の起源となること、を明らかにしました。
本研究の成果は、2024年12月4日(水)に英国王立協会誌「Royal Society Open Science」により公開されました。
詳細は大阪大学ホームページ(ResOU)をご参照ください。
【用語説明】
(※1) 微分幾何学
微分操作を通して対象の形の特徴(幾何学)を調べる分野のこと。例えば、曲線や曲面の曲がり方の指標(曲率)を数式で表すことができる。物理学では微分幾何学を使って理論を記述する例が多く、その代表例の一つがEinsteinの重力理論である。
(※2)らせん転位
結晶に見られる原子配列の乱れの一種で、らせん階段に似た結晶格子の乱れを引き起こす。物理的にはVolterra欠陥、数学的には一次元トポロジカル欠陥の一種と考えることができる。
(※3)曲率
微分幾何学で用いられる、空間の曲がり方を表す指標の一つ。一例として、球の表面は半径に反比例した一定の曲率を持つと考えられる。この研究では、らせん転位が生み出す結晶のゆがみをリッチ曲率として評価した。
(※4)幾何学的なフラストレーション
通常、フラストレーション状態とは系がエネルギーの最安定状態を取ることができず、準安定的な状態に留まることを指す。ここでは転位による結晶空間のリッチ曲率が、本来のユークリッド空間とは幾何学的に不整合となり、そのため弾性変形を伴う準安定的な状態にあることを意味している。
Last Update : 2025/04/18
【生体工学領域・青井 伸也 教授】
歩行における左右の足の交互運動は厳密には制御されていない
―歩行障害の原因究明、新たなリハビリ手法・歩行支援装置への応用に期待―

・歩行における左右の足の交互運動は厳密には制御されていないことを発見
・複雑な身体運動のために、これまで肢間協調(左右の足を協調的に動かすこと)
の制御の実態をつかむことができなかったが、位相縮約理論(※1)とベイズ推定
(※2)の手法により可能に
・肢間協調を積極的に制御しないことは、エネルギーを効率化できるほか、ある程
度のゆらぎを許容することでさまざまな状況に対応できる能力の向上にもつなが
るため、このような制御戦略をとっていると予想される
・加齢や脳疾患による歩行障害の原因究明や、新たなリハビリ手法・歩行支援装置
への応用に期待
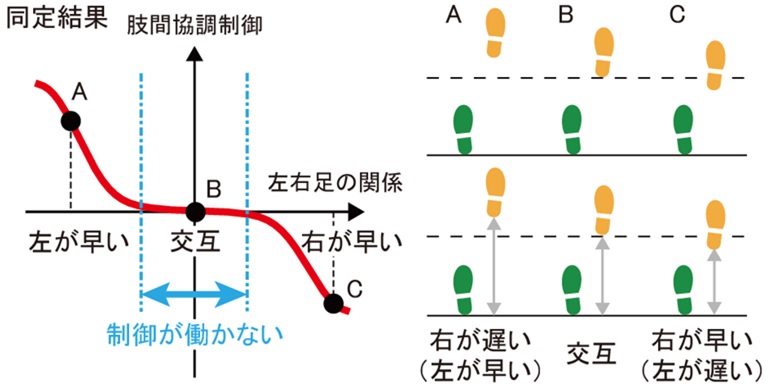
我々は、左右の足を交互に前に出して歩きます。この左右交互の関係性が崩れてしまうと歩行機能の低下を招くため、左右の足はきっちりと交互に前に出すように比較的厳密に制御されていると予想されていましたが、歩行における複雑な身体運動のために、その実態は未解明でした。
大阪大学大学院基礎工学研究科の青井伸也教授、海洋研究開発機構の荒井貴光研究員、京都大学大学院情報学研究科の青柳富誌生教授らの研究グループは、左右の足を協調的に動かす肢間協調の制御様式を位相縮約理論に基づく位相振動子(※3)を用いてモデル化し、健常者の歩行中の計測データを用いたベイズ推定により推定しました。その結果、これまでの予想に反して、左右の足の交互運動は、左右交互の関係から少しくらい外れても、元に戻そうとするような制御は働いておらず、この関係性は必ずしも厳密には制御されていないことを世界で初めて明らかにしました(図)。
歩行中の左右の足の協調性は加齢や脳疾患によって減退してしまい、歩行機能の低下を招いてしまいます。本研究成果により明らかにした肢間協調の制御様式が加齢や脳疾患によってどのように変化するかを今後調べることで、歩行機能が低下する原因の究明や、新たなリハビリ手法・歩行支援装置の開発などにつながると期待されます。
本研究成果は、英国科学誌「Communications Biology」に、2024年9月20日(金)18時(日本時間)に掲載されました。
詳細は大阪大学ホームページ(ResOU)をご参照ください。
【用語説明】
(※1) 位相縮約理論
周期的な閉軌道(リミットサイクル)を有する多次元からなる力学システムを、位相振動子を用いて近似的に記述する数学的手法。
(※2) ベイズ推定
観測事象から、推定したい事柄を確率的な意味で推論すること。
(※3) 位相振動子
周期的な振る舞いを位相を用いて記述するもの。
Last Update : 2025/04/18
【生体工学領域・青井 伸也 教授】
歩行の不安定化は役に立つ!?
-多足ロボットの機敏な歩行を実現する新技術-
 ・不安定性を利用することで多足ロボットの機敏で効率の良い歩行の実現に成功
・不安定性を利用することで多足ロボットの機敏で効率の良い歩行の実現に成功
・環境と複雑に相互作用する多くの足の運動計画や制御の問題に対して、直線歩行の安定性を制御する機構を導入し、通常排除する不安定性をむしろ積極的に利用することで機敏な歩行を実現可能にした
・惑星探査や災害現場のような人が立ち入ることの難しい場所など様々な状況での利用に向けた応用へ期待
 (図1)
(図1)
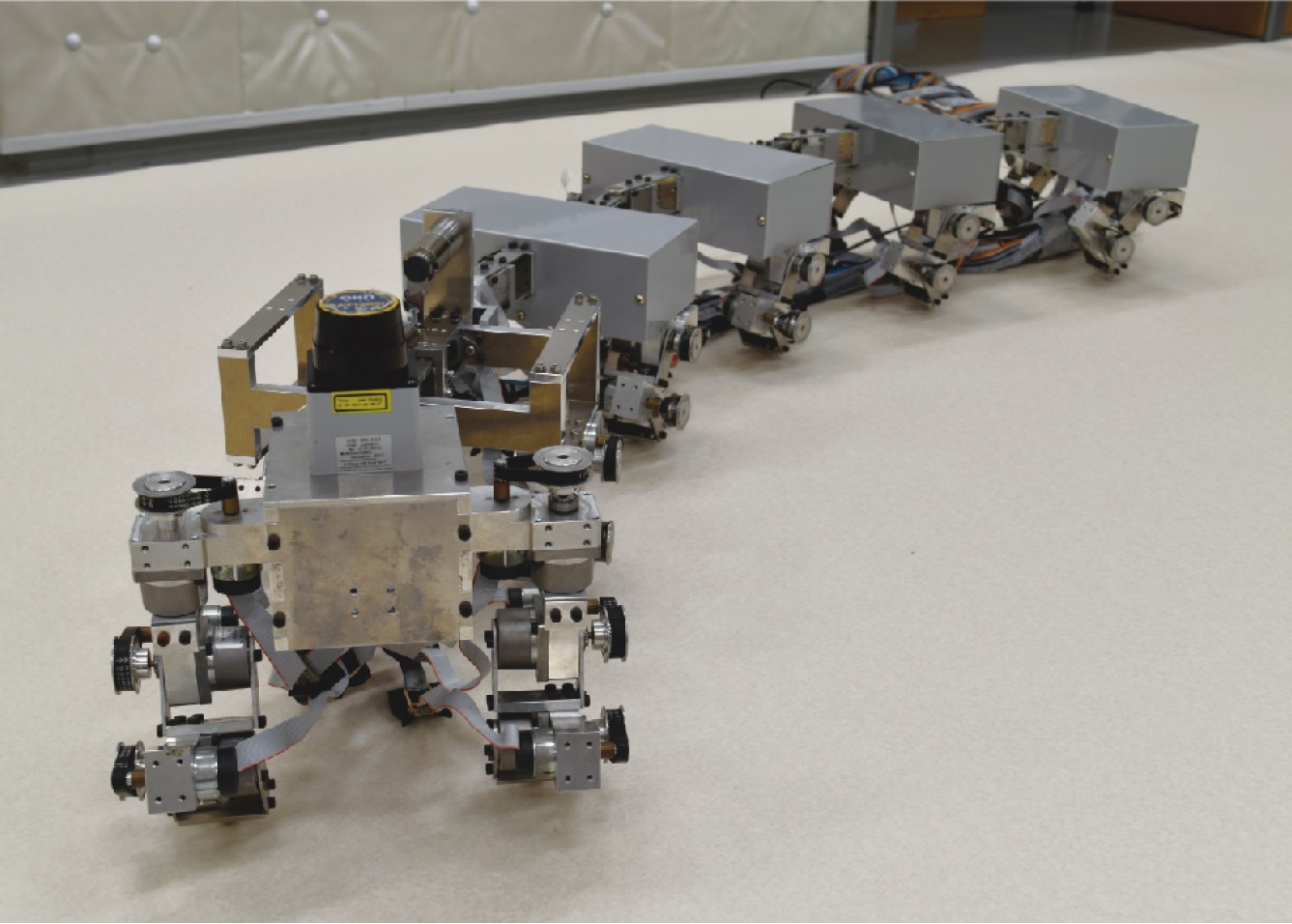
大阪大学大学院基礎工学研究科の青井伸也教授の研究グループは、不安定性を利用した多足ロボットの機敏で効率の良い歩行の実現に成功しました(図1)。
多足ロボットは、多くの足を持つために耐故障性や転倒回避性に優れており、様々な場所で活用できると期待されています。しかしながら、環境と複雑に相互作用する多くの足の運動計画や制御は難しく、その実現は困難でした。特に、地面につけている多くの足が障害となり、急旋回のような機敏な運動を行うことは至難の業でした。
青井伸也教授の研究グループでは、回転バネにより柔軟な体軸を持つ多足ロボットにおいて、そのバネ剛性をパラメータとするピッチフォーク分岐によって直線歩行が不安定化し、剛性に依存した半径を持つ円歩行に遷移することを明らかにしていました(Aoi et al., 2022)。今回、その剛性を変化させる機構をロボットに搭載することで直線歩行の不安定化を自在に引き起こし、さらにそれによって遷移する円歩行の半径を制御することで、機敏で効率の良い歩行の実現に成功しました。これにより、惑星探査や災害現場のような人が立ち入ることの難しい場所など、様々な状況での利用に応用されることが期待されます。
本研究成果は、米国科学誌「Soft Robotics」に、2023年5月29日(月)13時(日本時間)に公開されました。
詳細は大阪大学ホームページ(ResOU)をご参照ください。
Last Update : 2023/06/09

最新記事
- 大阪大学 基礎工学部 機械工学同窓会 主催
卒業生と学生との交流会 エンジニアのキャリアパス勉強会 2025 (2025/09/16) - 研究室だより Vol.29 垂水研究室 (2025/07/31)
- 研究室だより Vol.28 垂水研究室 (2025/07/02)
- 令和6年度WEB総会のご案内 (2025/06/03)
- 大谷 智仁 准教授が令和7年度 科学技術分野の文部科学大臣表彰を受賞 (2025/05/21)
News
同窓会について
会員の足跡
サイト内検索
